On the desk: two Olivetti M250, two Motorola Codex 2264.
How can I unify a single application of all the textual communication from correspondent journalists and external offices to the central HQ of the newspaper?
How can I flow all the data in the formatted and compatible way to the Editorial System network of twelve PDP11?
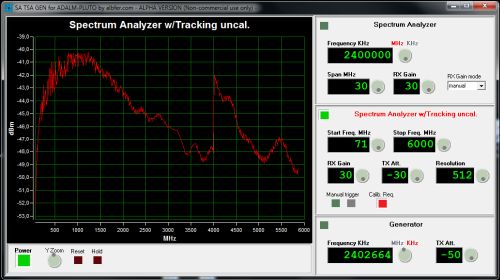
SATSAGEN is a Windows application that allows you to use an SDR device as a Spectrum Analyzer. SATSAGEN supports the ADALM-PLUTO device only, at the moment. and other SDR devices with the latest SATSAGEN releases, like RTL-SDR, HackRF, RSP1, and many others!
SATSAGEN is provided free of charge to the HAM Radio community, with the hope that SATSAGEN can be appreciated as a useful tool for our radio experimentation.
or other SDR devices with the latest SATSAGEN releases!
WARNING: At the first start, the application will perform on the device the frequency and bandwidth extension needed for the use of the 70MHZ-6000MHZ range, forcing the firmware to “see” the AD9363 transceiver as an AD9364.The extension is required for the application to work, but if you don’t want it to happen, don’t start SATSAGEN.
I would like to thank my friends Gianni IW1EPY, Domenico I1BOC and Mauro IZ1OTT for giving me the idea, the support in every sense, the radio components and the equipment necessary for the realization of the project!
A special thanks goes to Boian Mitov for the GREATS libraries www.mitov.com used in SATSAGEN!
Below you will found another valuable contribution by Gianni and at the end of the post you will find a short video that illustrates the application basics.
Alberto IU1KVL
“As Adalm Pluto owner I become acquainted to this device using radio programs (SDR Console, SDRAngel) to link Oscar 100. But for this kind of hardware my asking was for a measurement system. I have test cheap network analyzer in the range of 4,4 GHz, vector analyzer up to 900 MHz and my idea was to set Pluto in this class of instruments using the extended range 70 MHz to 6 GHz. After some encouraging trials from the RF point of view but disappointing for the measurement time delay in Matlab, I drag my friend Alberto into this adventure to have an acceptable measurement time using C libraries. Apart the nice Alberto’s program I add some Hardware notes. Adalm Pluto it is born for sure not for a professional measurement instruments so some drawbacks can be expected. Due to the large bandwidth usage forced by the program (original Pluto frequency usage spans from 325 MHz to 3,8 GHz) the input and output impedance for sure are not 50 ohms. A pair of attenuators on input and output mitigate the problem, for sure reducing the usable dynamic range but acceptable for HamRadio users. Using two 10 dB attenuators remain 40 dB down to the calibration level and 20 up in case of insertion of an active device under test. The missing metal box generate some crosstalk problems in the upper range of frequency specially if Pluto is moved around metal frames or touched by fingers… some people have reboxed it. The present structure (Pluto plus optional attenuators) allows a direct measurement of transfer function of filters, amplifiers, a directional coupler or a reflection bridge is mandatory for impedance measurement. Is possible to attach a file to correct the deviation of output power over the frequency sweep, unluckily every Pluto have its own variance. By now I have analyzed 5 devices and the correction curve are available. With the linearization file the output power can maintain an error of 1 dB versus 10 : 12 dB of the unleveled , most of this nonlinearity is located in the range from 50 to 300 MHz end 4.5 to 6 GHz obviously where Pluto was not designed for. The receiver gain and the generator attenuator do not increase the linearization error, so one linearization file is enough. Pay attention to not overload the receiver or saturate the generator but this behavior become immediately evident. To enhance the dynamic linearization is possible to apply a -40 dB calibration using a correct attenuator. This linearization performs in the range thill -40 db but almost kill the response from -40 to -60, in any case due to cross talk end receiver erroring this range is severely degraded even without this correction. All the level of the RX Gain and the Output Power and the attenuators that you have inserted at the I/O are programmable. Any idea of improvement ? This is the list of future enhancement: Calibration using a directional coupler or bridge averaging open and short. Offset between transmitter and receiver in order to test conversion systems. Harmonic response of devices in order to test amplifiers or multipliers. Open to suggestions. I think that Adalm Pluto with SATSAGEN, covering 7 Ham bands, will be useful in designing and testing to every ones involved in RF field. IW1EPY“
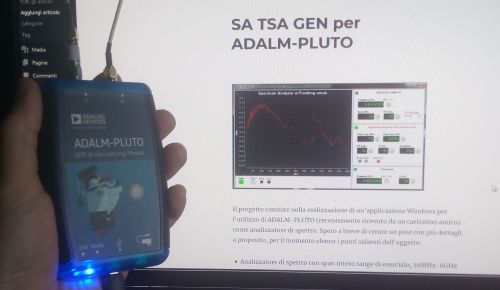
The project consists in the develop of a Windows application for the use of ADALM-PLUTO (recently received as a gift from a dear friend) as a spectrum analyzer.
I hope to write a post about this soon as well, anyway I list the highlights of the project now:
Spectrum analyzer with full span operating range 70MHz-6GHz and representation of signal amplitude in dBm.
Spectrum analyzer with tracking generator. Resolution up to 1024 points.
Generator with 1 KHz of frequency resolution
The software and hardware prerequisites are:
CPU: an old 1.7GHz Pentium M is more than enough!
OS:> = Windows 7
ADALM-PLUTO extended to let the FW “see” the AD9363 as an AD9364
Analog Devices drivers installed (PlutoSDR-M2k-USB-Drivers)
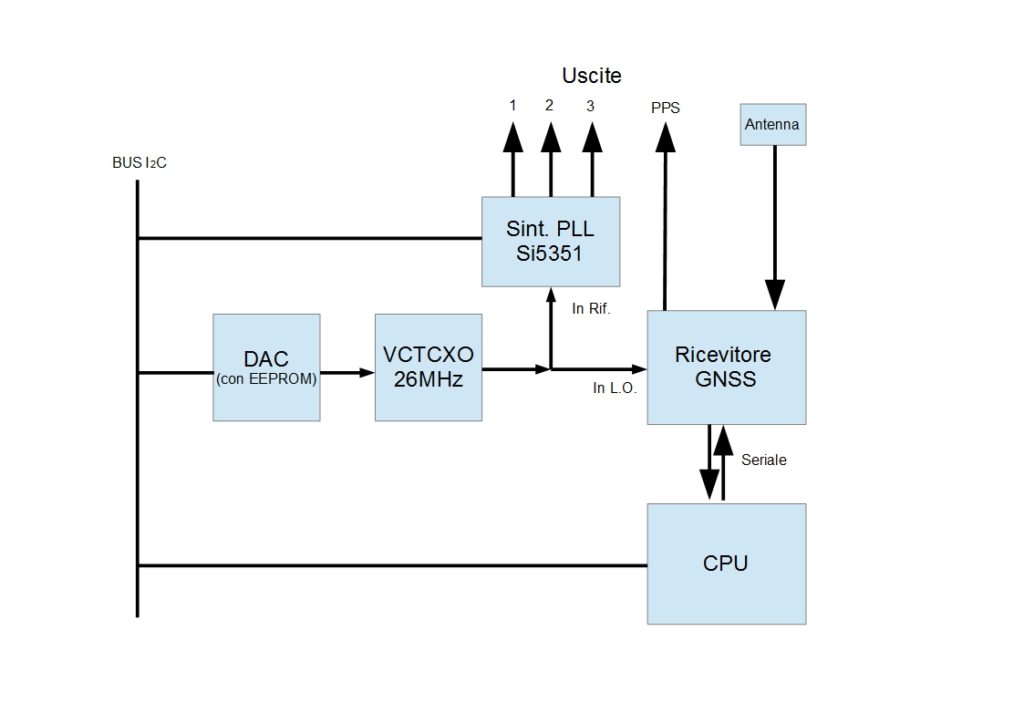
This equipment is a precise clock generator, able to provide programmable frequencies from 8KHz to 200MHz on three independent outputs.
The generation of the signals is provided by a Si5351A. In this application, the Si5351A PLL uses as a reference a disciplined oscillator (GPSDO) based on the G7020-KT chip.
The control of GPSDO, PLL and the user interface (a 101X80 pixel color LCD and an encoder) is provided by an ATMega328P operating at 3.3V-8MHz.
Power is supplied by a 3.7V 600mA lpo battery which guarantees about four hours of use. The battery is connected to the step-up module which provides 5V for some modules and 3.3V through two LDOs via a CPU-controlled mosfet switch; the use of the mosfet guarantees the switching off of the appliance if the battery level drops. This switch circuit allows to have a quiescent current close to 0 uA. The charge and discharge control of the battery is also provided by the CPU and the TP4056/DW01A chips for charging and the overcharge protection and in additional overdischarge protection in the event of a CPU lock. The battery level is constantly displayed on the LCD, both during discharge and charging phases.
The “heart” of the generator is a VCTCXO oscillator which provides the reference to the G7020-KT GPS module and the Si5351A. The control voltage of the VCTCXO is given by a MCP4725 DAC (12bit resolution and I2C interface). The values sent to the DAC are processed by the CPU based on the feedback received from the GPS module about the offset of the reference oscillator with respect to the one hooked to the satellite. The CPU receives UBX messages about the Drift clock from the G7020-KT via a serial connection. The DAC is equipped with an internal EEPROM memory that allows the sending of the control voltage preset to VCTCXO at moment of power-up, to speed up the GPS syncronize.
From the user interface it is possible to set the frequencies and power levels of the three outputs of the Si5351, respectively with a resolution of 1Hz and with four different output levels; 0.76DBm, 7DBm, 10DBm and 12DBm. The equipment has also a fourth output in SMA, concerning the PPS output of the GPS module synthesizer, also this last output is programmable from the user interface in frequency from 1Hz to 24MHz (for an acceptable phase noise, use only 48MHz sub-multiples) and in duty cycle from 1% to 99%. It is possible to set the PPS active only during the GNSS sync, moreover it is also possible to set manually the value sent to the DAC, a useful function for example to speed up calibration in the event of VCTCXO replacement.
All the above settings can be saved in the EEPROM of the CPU so that after a few seconds from a subsequent restart, the equipment generates the frequencies with the saved settings.
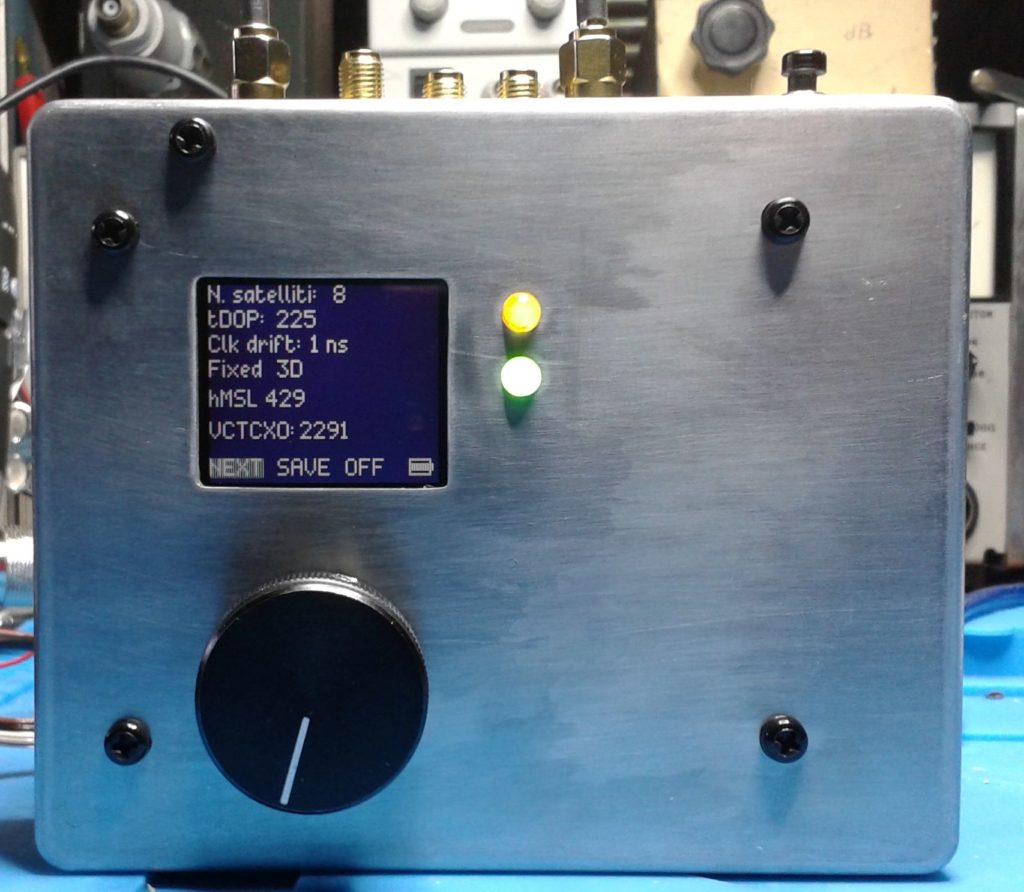
The yellow LED on the panel shows the PPS output signal negate (LED off = high signal), while the green LED indicates the correction operation performed on the VCTCXO: LED off = no GPS reception or PDO higher than 5 (minimum level to consider the clock drift), LED flashing = tDOP less than 5, clock drift above +/- 4ns and a correction of the VCTCXO voltage by the DAC is in progress, LED on steady = clock drift below +/- 5ns.
Finally, the following dynamically updated values are displayed on the GPS screen: number of satellites used, the DOP (time dilution of precision), the clock drift value expressed in ns (corresponding to an oscillator deviation of 0.026 Hz per unit ), the type of fixed none, 2D or 3D, the position in longitude and latitude and meters above sea level, date and time in UTC, and finally the value of the voltage sent by the DAC to the VCTCXO in the range from 0 to 4095 (in steps of about 0.8mv); the VCTCXO responds to the control voltage in a negative way, so as the voltage rises the frequency of the VCTCXO drops.